Operating System - Lecture 4: CPU Scheduling
Introduction
- CPU scheduling is fundamental in multiprogrammed systems — it determines which process uses the CPU at any given time.
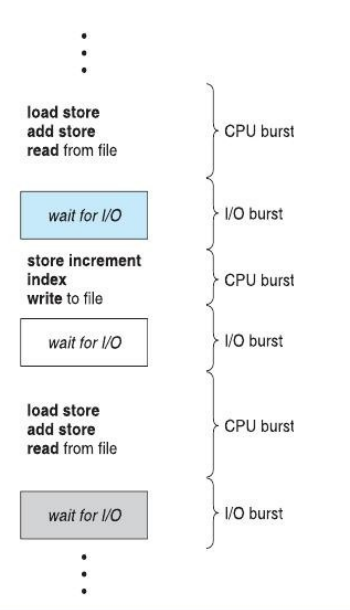
- A process execution cycle alternates between:
- CPU burst – when the process uses the CPU.
- I/O burst – when the process waits for I/O operations.
- The final CPU burst usually ends with a system call to terminate execution.
CPU Scheduling Overview
- CPU Scheduling optimizes process execution order for better system performance.
- The short-term scheduler selects a process from the ready queue and allocates the CPU to it.
- Scheduling decisions occur when a process:
- Switches from running -> waiting
- Switches from running -> ready
- Switches from waiting -> ready
- Terminates
Scheduling Types
| Type | Description |
|---|---|
| Preemptive | CPU can interrupt and switch to another process before completion |
| Non-preemptive | Process retains CPU until it releases it voluntarily |
Preemption
- Definition: Temporarily removing a process from the CPU in favor of another (e.g., higher priority or shorter job).
- Used to improve responsiveness and ensure fair CPU distribution.
Non-Preemptive vs Preemptive Scheduling
| Aspect | Non-Preemptive | Preemptive |
|---|---|---|
| CPU Allocation | Process keeps CPU until completion or I/O wait | CPU assigned for a limited time |
| Interrupt | Process runs until it voluntarily releases CPU | Can interrupt a process at anytime |
| Overhead | Low (No overhead of switching mid-execution) | High (due to context switching) |
| Starvation | Possible if long jobs block short ones | Possible if high-priority tasks frequently arrive |
| Synchronization | Easier | Complex with shared data and kernel activities |
| Flexibility | None; cannot interrupt current task | Flexible; can prioritize urgent processes |
| CPU Utilization | Lower | Higher |
| Waiting Time | Higher | Lower |
| Response Time | Slower | Faster, but risk of race conditions |
| Examples | FCFS, Shortest Job First | Round Robin, Shortest Remaining Time First |
Dispatcher
- The dispatcher transfers CPU control to the selected process.
Steps:- Context switch
- Switch to user mode
- Jump to the user program's next instruction
- Dispatch latency: the time required to stop one process and start another.
Scheduling Criteria
| Metric | Description | Goal |
|---|---|---|
| CPU Utilization | Keep CPU busy | Maximize |
| Throughput | Number of processes completed per unit time | Maximize |
| Turnaround Time | Total time from submission to completion | Minimize |
| Waiting Time | Time spent waiting in the ready queue | Minimize |
| Response Time | Time from request submission until first response | Minimize |
Scheduling Algorithm Formulas
- Turnaround Time = Completion Time − Arrival Time
- Waiting Time = Turnaround Time − Burst Time
- Throughput = Total Processes / Total Completion Time
Scheduling Algorithms
- First-Come, First-Served (FCFS)
- Shortest Job First (SJF)
- Priority Scheduling
- Round Robin (RR)
- Multilevel Queue Scheduling
- Multilevel Feedback Queue Scheduling
First-Come, First-Served (FCFS)
- Processes are executed in order of arrival (FIFO queue).
- Process Control Block (PCB) added to queue tail upon arrival.
- When CPU is free, process at the head gets executed.
- Simple to implement but inefficient for varying burst times.
Example
| Process | Burst Time |
|---|---|
| P1 | 24 |
| P2 | 3 |
| P3 | 3 |
Order: P1 -> P2 -> P3
Average Waiting Time = (0 + 24 + 27)/3 = 17
Gantt Chart:
| P1 |------------------------| P2 |---| P3 |---|
0 24 27 30Reordered (P2, P3, P1): Average Waiting Time = 3
Drawback: Convoy effect – long processes delay short ones.
Advantages and Disadvantages
| Advantages | Disadvantages |
|---|---|
| Easy to implement | High waiting time for short processes |
| Fair (no starvation) | Poor CPU utilization |
2. Shortest Job First (SJF)
Concept
- Each process is associated with the length of its next CPU burst.
- The process with the shortest burst time is scheduled next.
- Optimal for minimizing average waiting time but requires burst prediction.
Burst Length Prediction
Where:
: predicted burst time for next cycle : actual burst time for current cycle : smoothing factor ( ), often 0.5
Advantages
- Efficent and minimizes average waiting time.
Disadvantages
- Difficult to predict burst length.
- Starvation possible for longer processes.
3. Shortest Remaining Time First (SRTF)
- Preemptive version of SJF.
- Chooses process with the least remaining CPU burst time.
Advantages
Lower average waiting time than non-preemptive.
Disadvantages
- Complex to estimate burst times.
- Risk of starvation and excessive context switches.
4. Priority Scheduling
Concept
- Each process has a priority number; lower numbers indicate higher priority.
- The CPU is allocated to the highest-priority process.
- Can be preemptive or non-preemptive.
- SJF is a special case of priority scheduling where priority = 1 / (next CPU burst time).
Issues
- Starvation: low-priority processes may never execute.
- Solution: Aging – increase process priority the longer it waits.
Example
| Process | Burst | Priority |
|---|---|---|
| P1 | 10 | 3 |
| P2 | 1 | 1 |
| P3 | 2 | 4 |
| P4 | 1 | 5 |
| P5 | 5 | 2 |
Average Waiting Time ≈ 8.2 ms
Advantages
- Flexibility based on importance
Disadvantages
- Starvation of low-priority jobs
- Complex to manage dynamically
5. Round Robin (RR)
Concept
- Each process gets a fixed time quantum (q) (10–100 ms typical).
- After the quantum expires, the process is preempted and placed at the end of the ready queue.
- Suitable for time-sharing systems.
Example (q = 4)
| Process | Burst Time |
|---|---|
| P1 | 24 |
| P2 | 3 |
| P3 | 3 |
Order: P1 -> P2 -> P3 -> P1 -> …
Average Waiting Time = 3.6 ms
Formulas
- Turnaround Time:
End Time - Arrival Time - Waiting Time:
Turnaround Time - Burst Time
Characteristics
- Fairness: all processes get CPU time, no starvation.
- Performance depends on quantum size:
- Large q -> behaves like FCFS.
- Small q -> high overhead due to frequent context switches.
Comparison of Scheduling Algorithms
- Preemptive algorithms yield better performance, but risk starvation.
- FCFS is simplest but performs poorly for interactive systems.
- Round Robin ensures fairness and avoids starvation in time-shared systems, but depends heavily on quantum size.
Multilevel Queue Scheduling
- Ready queue divided into multiple queues.
- Each queue has its own scheduling algorithm:
- Foreground (interactive) -> Round Robin
- Background (batch) -> FCFS
Scheduling Between Queues
- Fixed Priority: serve all foreground before background (risk of starvation).
- Time Slice: allocate CPU time proportionally (e.g., 80% to foreground, 20% to background).
Multilevel Feedback Queue Scheduling
Processes can move between queues based on behavior and aging.
Implements aging to prevent starvation.
Parameters:
- Number of queues
- Scheduling per queue
- Promotion/demotion policies
- Queue entry rules
Example:
| Queue | Algorithm | Time Quantum |
|---|---|---|
| Q0 | Round Robin | 8 ms |
| Q1 | Round Robin | 16 ms |
| Q2 | FCFS | – |
Evaluation of Scheduling Algorithms
Evaluation methods help determine the most effective algorithm per use case.
1. Deterministic Modeling
- Evaluates performance for fixed workloads.
- Simple, fast, but only valid for specific input values.
2. Queueing Models
- Represents system as a network of queues (CPU, I/O).
- Uses Little's Formula:
n: average number of processes in queueλ: arrival rateW: average waiting time
3. Simulation
- Emulates system behavior using random input or real trace data.
- Allows more accurate, flexible analysis.
4. Implementation
- Most accurate but costly and environment-dependent.
- Requires modifying and testing the OS itself.
- Environment and workload variations affect results.